Neurowissenschaftler konnten die Steuerung von Greifbewegungen der Hand im Primatengehirn nachvollziehen und entsprechende Handkonfigurationen auf eine Roboterhand übertragen. Querschnittsgelähmte Patienten könnten zu den Profiteuren gehören.
Schnürsenkel binden, den Kaffee umrühren, Briefe schreiben, Klavier spielen. Von alltäglichen bis hin zu anspruchsvollen Tätigkeiten: Unsere Hände benutzen wir so häufig wie kein zweites Körperteil. Durch die ausgeprägte Feinmotorik sind wir in der Lage, Greifbewegungen mit unterschiedlicher Präzision und Kraftverteilung anzuwenden. Diese Fähigkeit ist ein grundlegendes Merkmal der Primatenhand. Wie Handbewegungen im Gehirn geplant werden, war bis jetzt noch weitgehend unklar. Stefan Schaffelhofer, Andres Agudelo-Toro und Hansjörg Scherberger vom Deutschen Primatenzentrum (DPZ) konnten mit ihrer jüngsten Forschung an Rhesusaffen zeigen, wie verschiedene Greifbewegungen im Gehirn gesteuert werden.
Anhand elektrophysiologischer Messungen in jenen Hirnarealen, die für die Planung und Umsetzung von Handbewegungen verantwortlich sind, konnten die Wissenschaftler eine Vielzahl von Handstellungen durch die Analyse genau dieser neuronalen Signale vorhersagen. In ersten Anwendungsversuchen konnten die so entschlüsselten Grifftypen auf eine Roboterhand übertragen werden. Die Ergebnisse der Studie sollen künftig in die Entwicklung von Neuroprothesen einfließen, um gelähmten Patienten die Wiedererlangung von Handfunktionen zu ermöglichen.
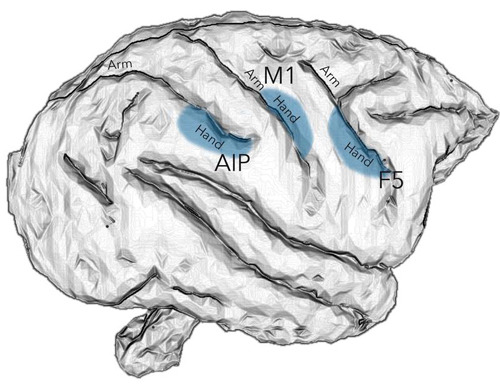
„Wir wollten herausfinden, wie verschiedene Handbewegungen vom Gehirn gesteuert werden und ob wir die Aktivität von Nervenzellen nutzen können, um unterschiedliche Grifftypen vorherzusagen“, sagt Stefan Schaffelhofer, Neurowissenschaftler in der Abteilung Neurobiologie des DPZ. Im Rahmen seiner Doktorarbeit hat er sich intensiv mit jenen Gehirnarealen der Großhirnrinde beschäftigt, die für die Planung und Ausführung von Handbewegungen verantwortlich sind. Dabei hat er herausgefunden, dass visuelle Informationen für greifbare Objekte, speziell deren dreidimensionale Form und Größe, vornehmlich in der Region AIP verarbeitet werden. Die Übertragung der visuellen Eigenschaften eines Gegenstandes in entsprechende Bewegungsbefehle wird dagegen überwiegend in den Arealen F5 und M1 gesteuert.
Um die Regulierung verschiedener Greifbewegungen in diesen Hirnregionen im Detail zu untersuchen, wurde die Aktivität von Nervenzellen mit sogenannten Multielektrodenarrays aufgezeichnet. Die Forscher haben die Rhesusaffen darauf trainiert, 50 Objekte unterschiedlicher Form und Größe wiederholt zu greifen. Gleichzeitig wurden alle Finger- und Handbewegungen der Affen mit Hilfe eines elektromagnetischen Datenhandschuhs aufgezeichnet, um die angewandten Grifftypen zu identifizieren und mit den neuronalen Signalen vergleichen zu können.
„Wir haben alle Objekte vor Beginn einer Greifbewegung beleuchtet, sodass die Affen sie sehen und deren Form erkennen konnten“, erklärt Stefan Schaffelhofer. „Die anschließende Greifbewegung fand dann mit kurzer Verzögerung im Dunkeln statt. So konnten wir die Reaktionen der Nervenzellen auf die visuellen Reize von den rein motorischen Signalen trennen und außerdem die Phase der Bewegungsplanung untersuchen.“ Handbewegungen werden im Primatengehirn durch die Areale AIP, F5 und M1 gesteuert. © Grafik: Stefan Schaffelhofer
Anhand der Aktivität der Nervenzellen, die während der Planung und Ausführung der Greifbewegungen gemessen wurde, konnten die Wissenschaftler anschließend Rückschlüsse auf die angewendeten Grifftypen ziehen. Die vorhergesagten Griffe wurden mit den tatsächlich im Versuch aufgezeichneten Handkonfigurationen abgeglichen. „Die Aktivität der gemessenen Gehirnzellen ist stark vom angewandten Griff abhängig. Anhand dieser neuronalen Unterschiede, können wir berechnen, welche Handbewegung das Tier ausführt“, sagt Stefan Schaffelhofer. „In der Planungsphase lagen wir damit zu 86 Prozent richtig, in der Greifphase konnten wir die Bewegung zu 92 Prozent richtig bestimmen.“
Die so entschlüsselten Handkonfigurationen wurden anschließend erfolgreich auf eine Roboterhand übertragen. Damit haben die Wissenschaftler gezeigt, dass eine große Anzahl verschiedener Handstellungen mittels neuronaler Planungs- und Ausführungssignale erfasst und genutzt werden kann. Eine Erkenntnis, die zukünftig vor allem für querschnittsgelähmte Patienten, bei denen die Verbindung zwischen Gehirn und Gliedmaßen nicht mehr funktioniert, eine große Bedeutung hat.
„Die Ergebnisse unserer Studie sind sehr wichtig für die Entwicklung von neuronal gesteuerten Handprothesen. Sie zeigen wo und vor allem wie das Gehirn Greifbewegungen steuert“, fasst Stefan Schaffelhofer zusammen. „Im Unterschied zu anderen Anwendungen ermöglicht unser Verfahren eine Vorhersage der Grifftypen bereits in der Planungsphase der Bewegung. In Zukunft könnten damit neuronale Schnittstellen generiert werden, die diese motorischen Signale auslesen, interpretieren und Prothesen steuern können.“ Originalpublikation : Decoding a wide range of hand configurations from macaque motor, premotor and parietal cortices. Stefan Schaffelhofer et al.; The Journal of Neuroscience 35(3):1068-1081, doi: 10.1523/JNEUROSCI.3594-14.2015; 2015